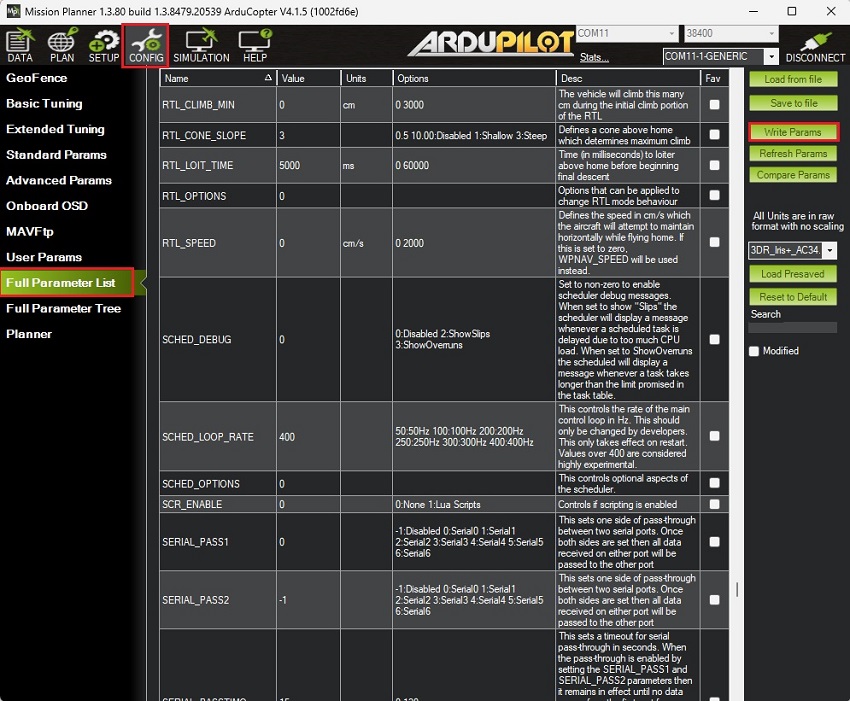
Go to CONFIG–>Full Parameter List.
Since the firmware versions may be different to yours, here is a list of all the parameters modified with respect to the default configuration:
COMPASS_ENABLE,0
COMPASS_USE,0
COMPASS_USE2,0
COMPASS_USE3,0
EK3_MAG_CAL,2
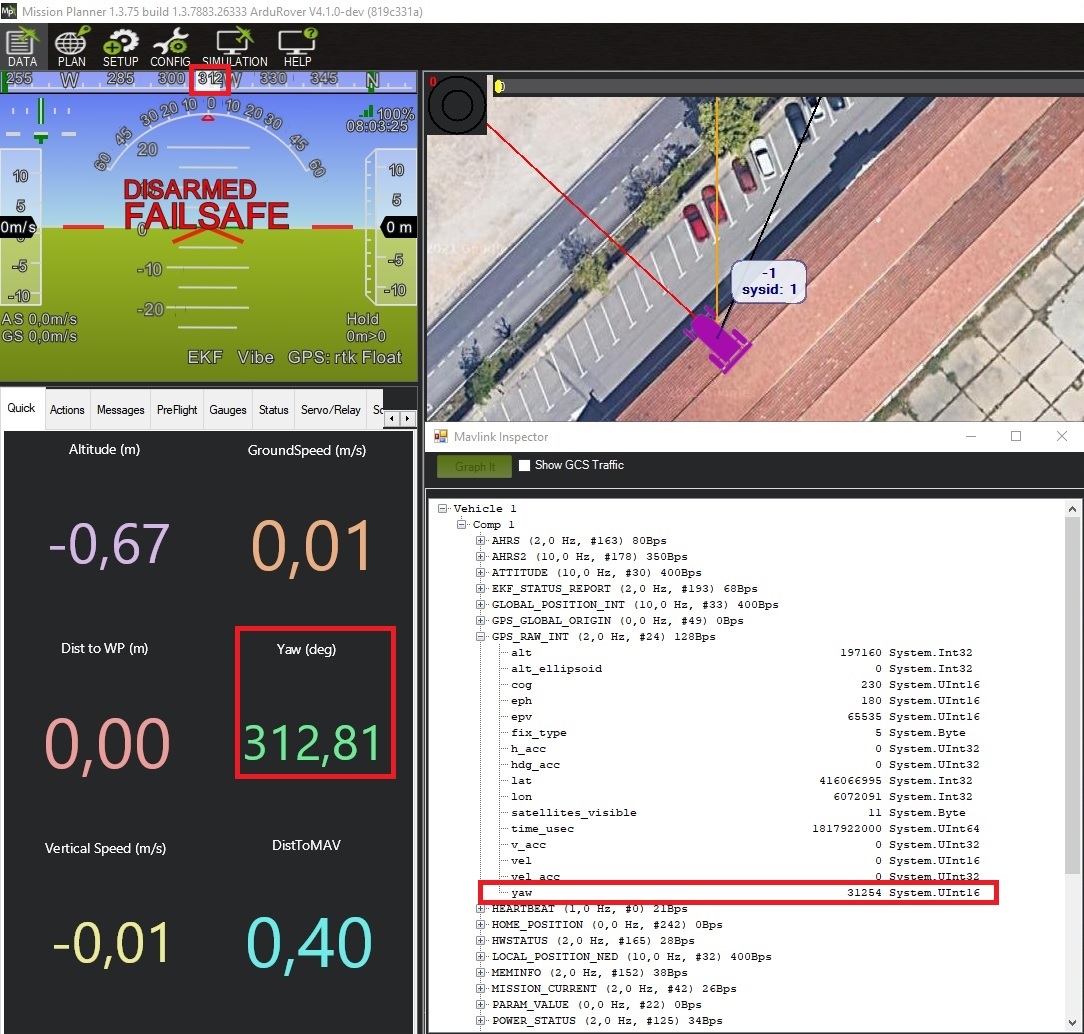
EK3_SRC1_YAW,2
GPS_AUTO_CONFIG,0
GPS_AUTO_SWITCH,0
GPS_RATE_MS, 100
GPS_TYPE,16
SERIAL1_BAUD,115
SERIAL1_PROTOCOL,5
Press Write Params to save your setting.


 and
and  How to get a quotation
How to get a quotation