 and
and 

How to connect to the Base station and see the Rover’s position in real time with the Base+Rover Kit

Would you like to be connected with your PC to the Base station, and in addition of seeing the Base´s position, also see real time the Rover’s position?
In this tutorial we will show you step by step how to do it.
Required hardware:
Required software:
- u-center (for F9 / M9 products)
How to connect to the Base station and see the Rover’s position in real time?
Firstly, configure your Rover.
- Connect your Rover receiver to your PC with the USB port labeled as POWER+GPS.
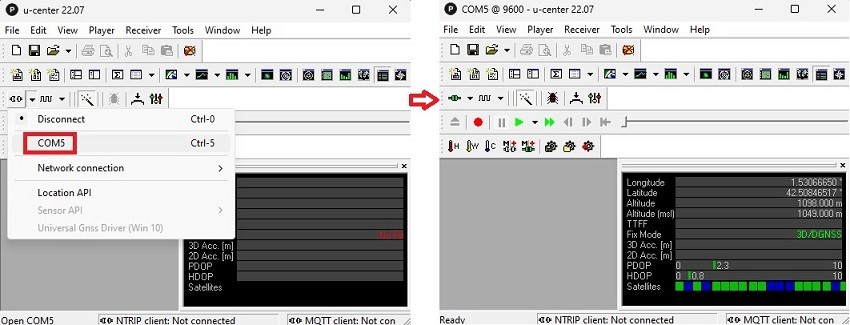
- Open u-center. Connect your receiver to u-center via COM port.
- Download the configuration file named as “Rover 1Hz with 4G NTRIP Client (sending NMEA-GGA)” from our Configuration Files page. Upload it to your Rover. Make sure you download the configuration file compatible with the firmware version of your receiver .
If you don´t know how to do this, have a look at this tutorial.
Secondly, now go to your Base.
- Connect the GNSS antennas to both your Base and Rover receivers. Place the antennas in a location with good view of the sky, or near a window for testing the functionality
- If you connect your Base through the USB port labeled as POWER+GPS, you will see the position of the Base station as before.
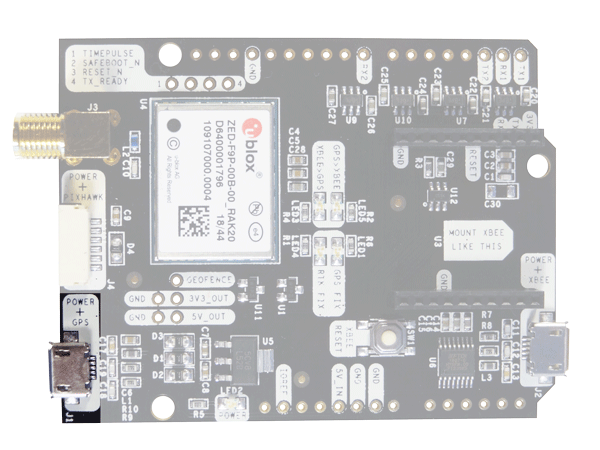
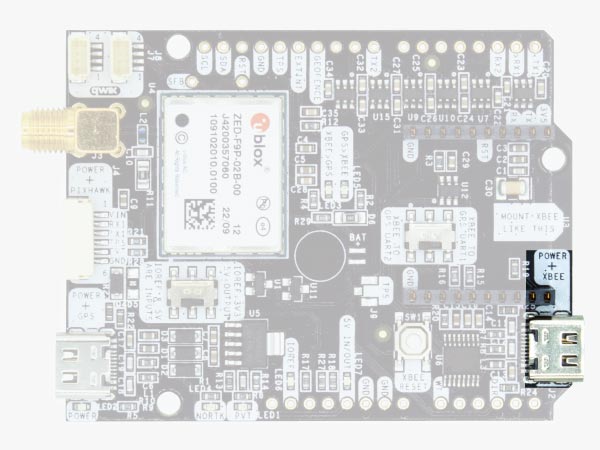
- Connect your Base receiver through the USB port labeled as POWER+XBEE.
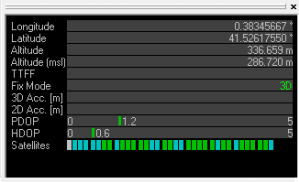
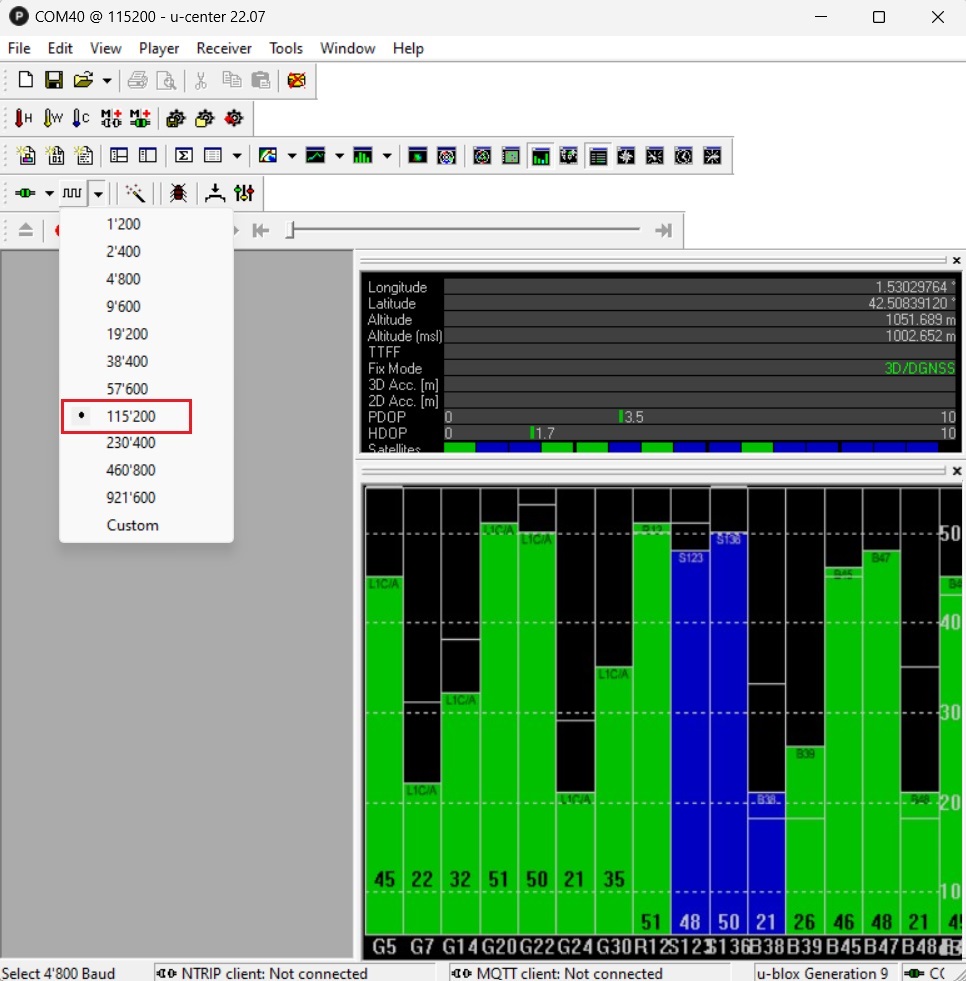
- Connect your Base receiver with u-center. Set baudrate to 115’200. You will see the position of your rover.
- If you have an Arduino project, you will have the Rover’s position available in the TX2, RX2 pins of your Base station of simpleRTK2B series boards!
- You will notice that only the position and fix status information is available, and there’s no information about satellite data. This is because the radio link has a limited bandwidth and we can only transmit one message from the base to the rover. We selected the GGA message which is a good trade-off between length and content. Moreover it is easy to read.
- Important note: This configuration only works with Rover working at 1Hz. If you want to increase the Rover navigation rate, make sure you reduce the GGA sening rate (UBX–>CFG–>MSG) with the same amount, so it’s only sent once per second.
Now you can track the location of your Rover on your Base in real time!
If you want to do this tutorial, we have all the products in stock and ready to be shipped:

RTK Assistant
Find the best products for your application in just a few questions.

