and
and 
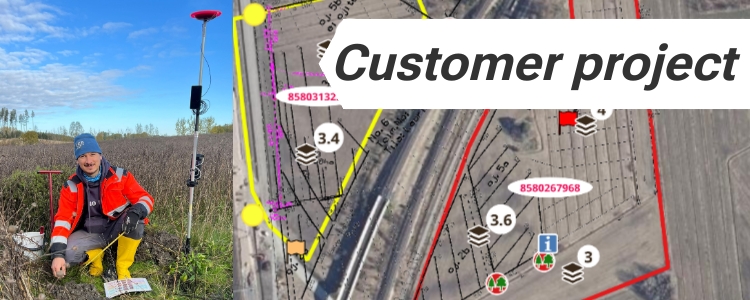
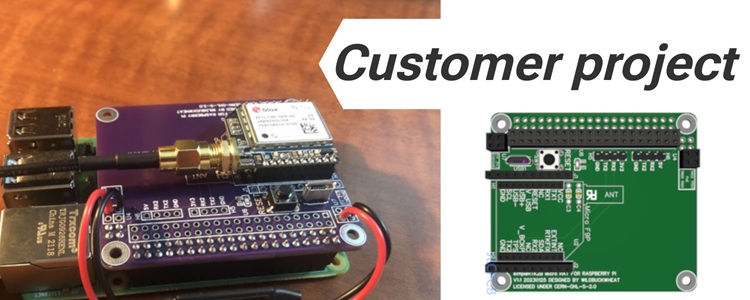
Centimeter-accurate camera tracking for large-scale 3D capture (Gaussian splatting)
Overview This customer project comes from Aryonix, founded by Alexandre Cavaleri. Aryonix develops a real-time rendering engine capable of creating cinematic, photorealistic and immersive 3D environments from photographs. Aryonix collaborated with Downhill Wings, a project dedicated to exploring, mapping and filming downhill routes for inline skates, longboards and other gravity sports. The project uses a […]
Centimeter-accurate camera tracking for large-scale 3D capture (Gaussian splatting) Read More »