 and
and 


Setting up the base:
Start with the simpleRTK2B board labelled as “BASE”.
Do not power the board until the installation is finished. Because once the board is powered, it is very important to not move the GPS/GNSS antenna nor obstruct its visibility from the sky.
That being said, take the BASE unit and its antennas and install them in a fixed location with line of sight to the the area where the other unit will move around.
 The top of a barn roof is a good place to install the base station.
The top of a barn roof is a good place to install the base station.
Once the installation is done, you are ready to power the board:
You can connect to “XBEE+POWER” to a wall adapter. If you are an advanced GPS user and would like to check the base station parameters, you can do this by connecting the “GPS+POWER” to your PC.
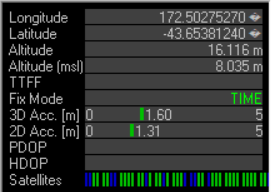
The BASE unit comes pre-configured so that once your power it up, it calculates its absolute position with an accuracy of 2.5meters. This process takes around 10 minutes. If you are not sure if the process finished, connect to the base and confirm that the fix type = TIME.
If you connect with u-center software, you should see the following “TIME” text in this Window. If you don’t find this Window in your u-center, you can open it via the Menu Bar > View > Docking Windows > Data.
Once the base is in TIME mode, the unit will start sending corrections so that the rover can start calculating its relative position within centimeters.
You will also notice that the LED “GPS>XBEE” will increase its activity.
If high relative accuracy is not enough for you, and you need high absolute accuracy, you have 2 options:
- You can re-configure the base, to calculate its position with better absolute accuracy.
You can use the message UBX-CFG-TMODE3 for that.
You can monitor the status of this calculation with message UBX-NAV-SVIN.
The better absolute accuracy you want, the longer it will take to calculate it.
To give you an idea, with 6 hours you can achieve decimeter accuracy. - If you know the exact position of the base station, you can also set it directly.
While you wait, you can start setting up the rover.
- Sale!
 Made in EuropeRTK starter kits
Made in EuropeRTK starter kitsLong Range Radio – RTK Starter Kit
592,00€ This product has multiple variants. The options may be chosen on the product page - Sale!Made in EuropeRTK starter kits
Medium Range Radio – RTK Starter Kit
Original price was: 512,00€.499,00€Current price is: 499,00€. - Sale!Made in EuropeRTK starter kits
Extra Long Range Radio – RTK Starter Kit
699,00€ This product has multiple variants. The options may be chosen on the product page

