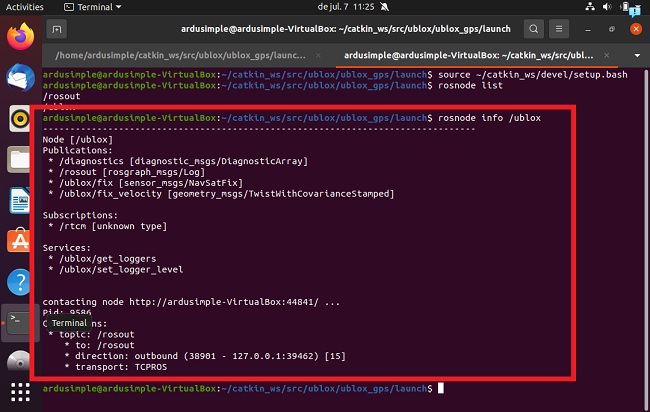
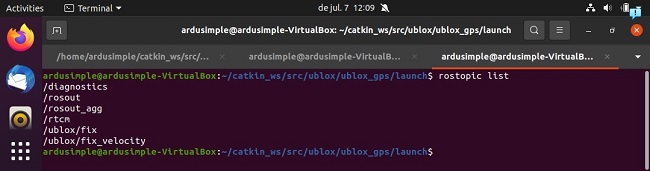
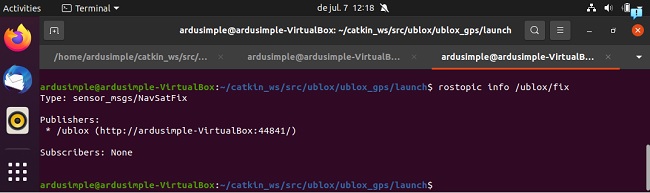
To test that it works we can subscribe to the different topics that the node creates.
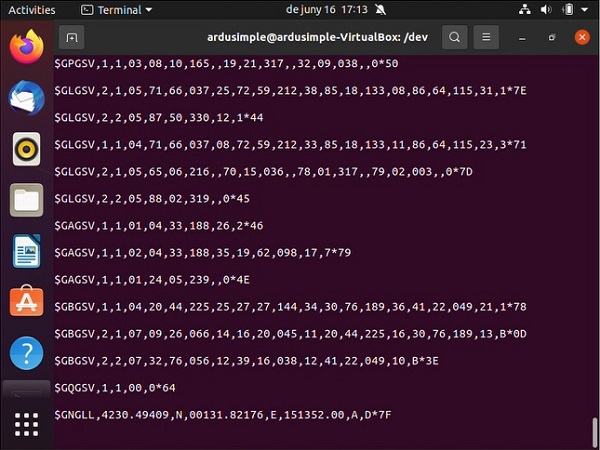
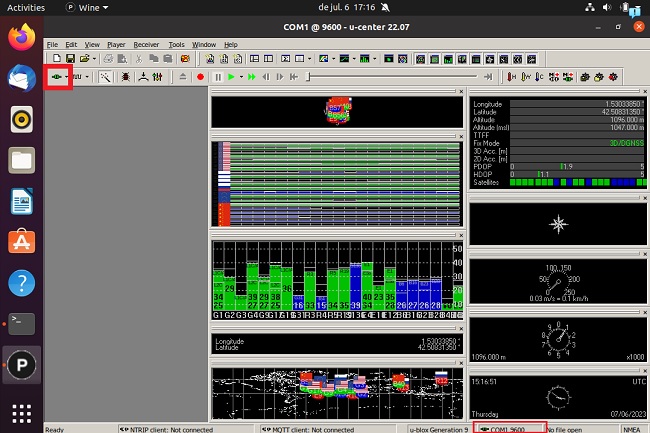
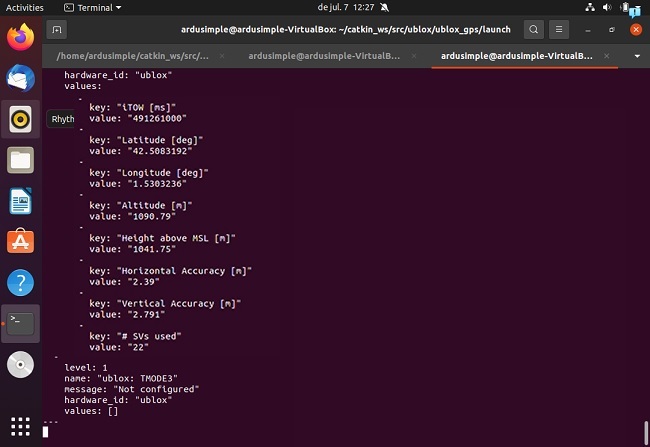
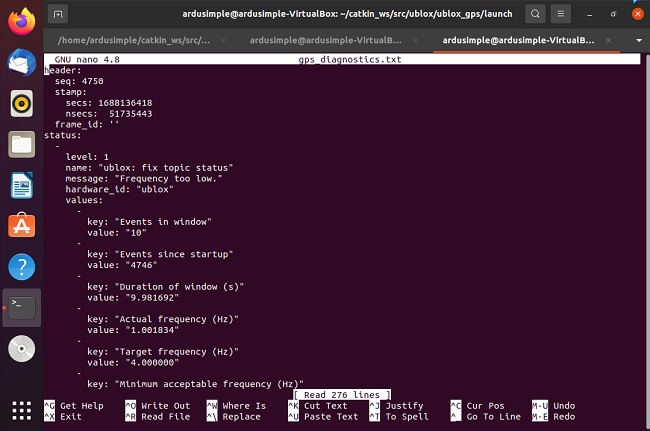
The most important ones are “/gps/fix” (are the data in WGS64) and “/diagnostics” (gives us information of the GPS status). Other data can be published according to the configuration that has been set from RTK receiver.
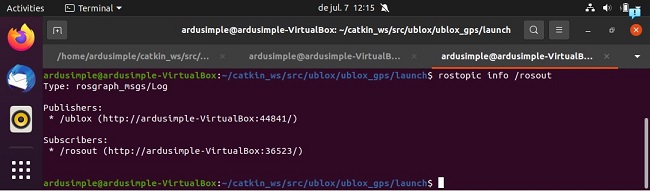
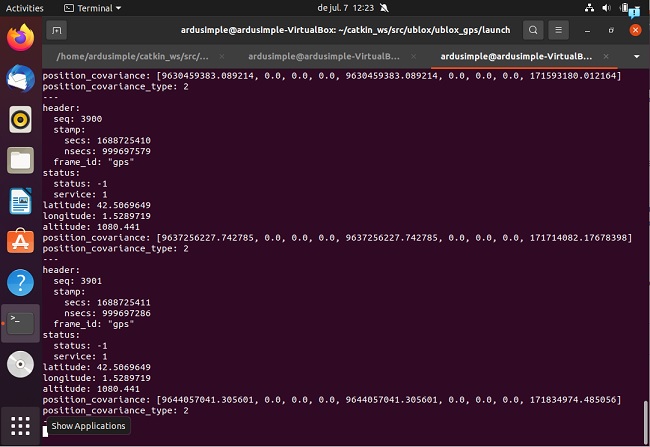
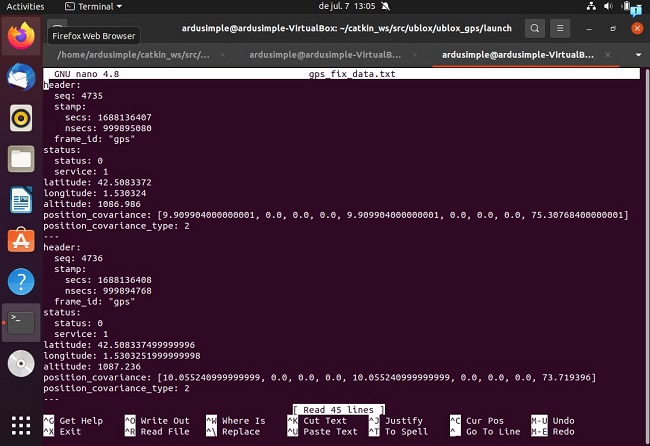
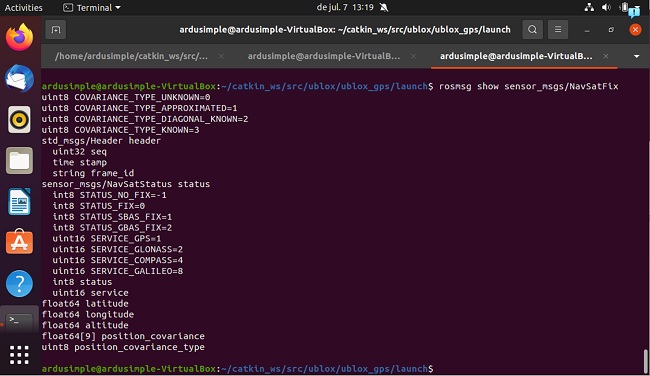
For example, to observe and monitor the GPS fix data being published on “/ublox/fix” Topic (are the data in WGS64), such as latitude, longitude, altitude, and other relevant information, use following command to view the data:
 and
and  How to get a quotation
How to get a quotation