and
and 


Using a known reference point
Using NTRIP service
Using an online PPP post-processing service
Using a known reference point
- Select an accurate and up-to date reference point, such as a geodetic control point or survey marker.
In this tutorial, we use the Senyals-geodesics of Catalunya.
Ensure that the reference point is situated in a location with a clear view of the sky, free from trees or other obstacles that may obstruct satellite signals. - Setting up the base station antenna above the reference point. With the use of a tribrach and tripod this can be done very accurately.

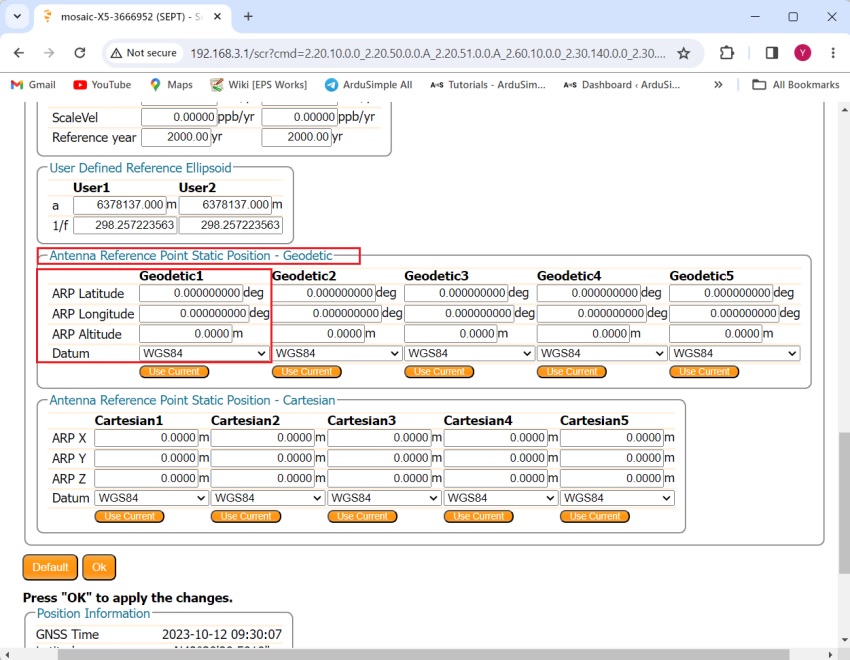
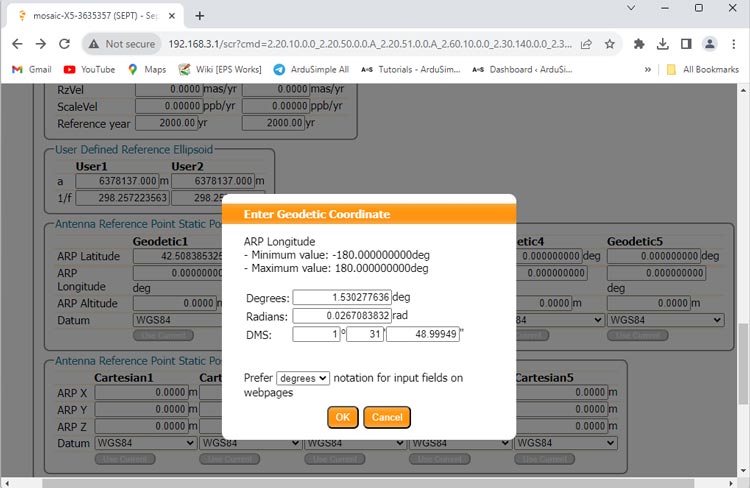
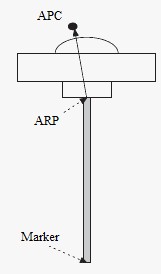
- The location of your base station will coincide with the Geodetic point’s location. You can retrieve the geographic coordinates information from the geodetic point’s description. Ensure to incorporate altitude information by adding the height difference between your Antenna Reference Point (ARP) and the marker.



Using NTRIP service
- Make sure there is a NTRIP service provider that covers your geographic location. If you are not aware of them, check this list. Most of these services are free but require registration.
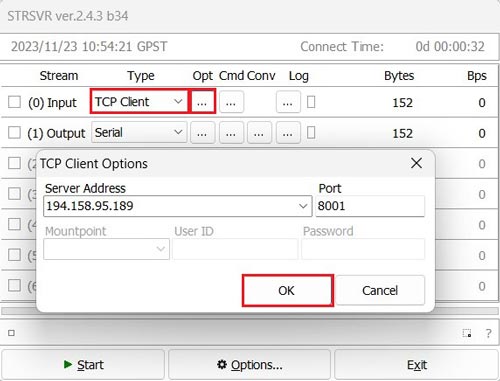
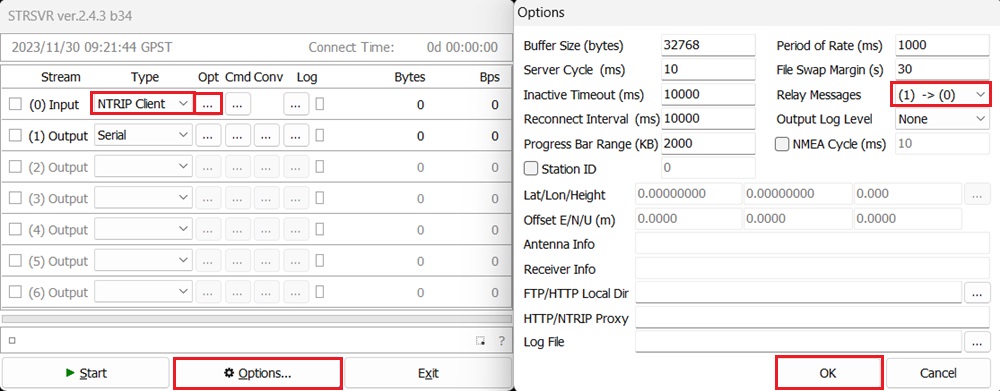
- Run STRSVR. At Input section, connect to an RTK network to receive corrections.
Under Type choose the correction you use. Click the … icon under Opt to edit your correction service.
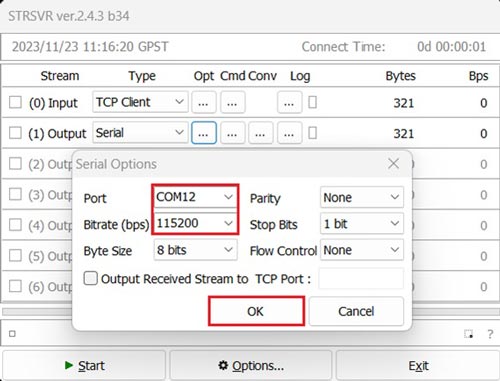
In this example, we are using the Andorra online correction service connected via TCP. - Select Serial at Output. Configure the appropriate COM port and Bitrate (Note: the COM Port number may differ from the image). Click OK.
- If you are using a NTRIP service, note that some NTRIP Caster will need the location of your base station.
Go to Options.
At Relay Messages choose (1)–>(0), which means sending Stream (1) Output to Stream (0) Input.
Thus the location information of your base station will be send back to NTRIP Caster.
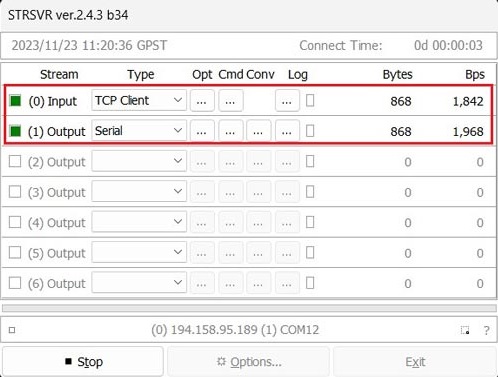
Remember to enable NMEA GGA output of your receiver at the same COM port. If you don’t know how to do it, check the User Guide.
- Click Start and you will observe data transmission.

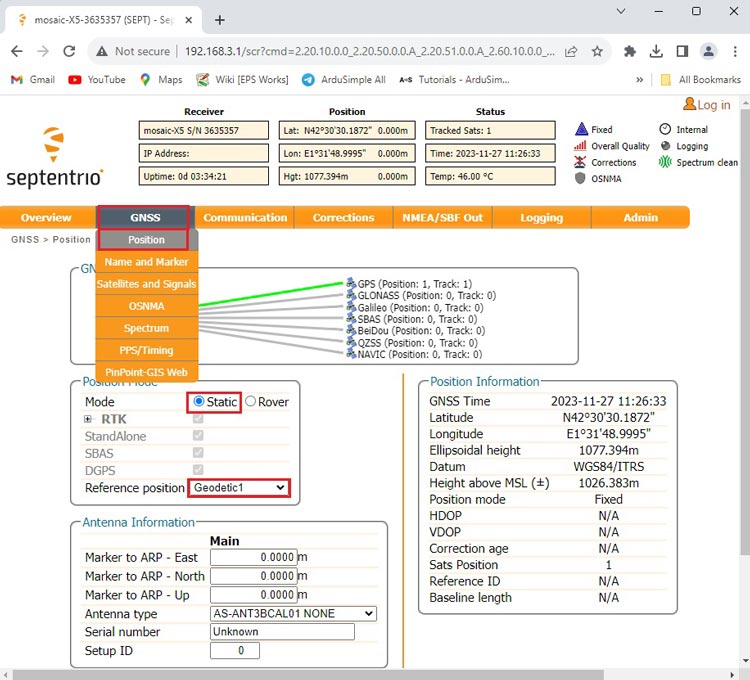
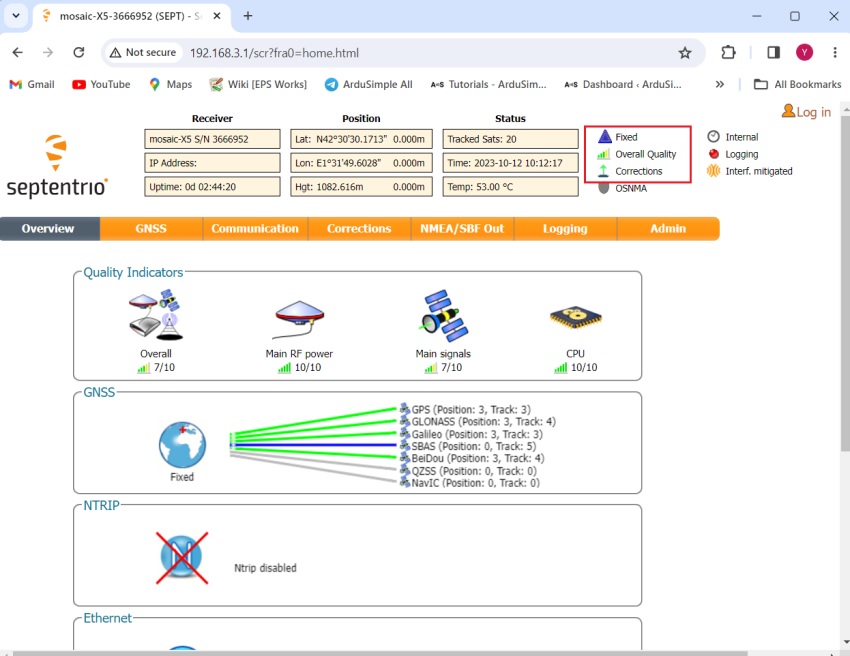
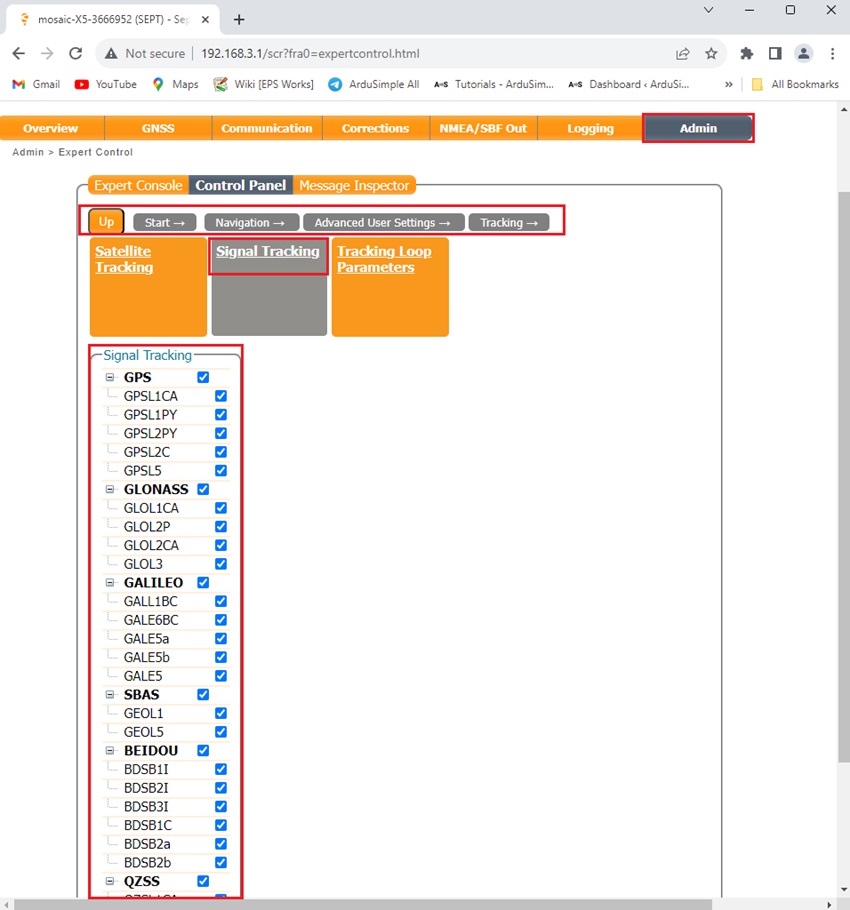
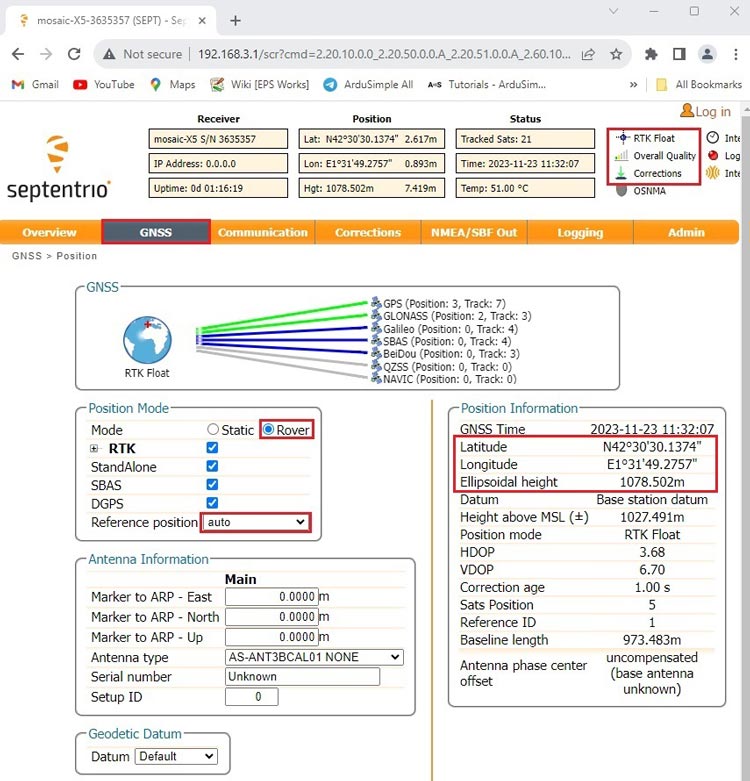
- Go back to Septentrio web interface. Go to GNSS–>Position. At position Mode select Rover. Reference position choose auto.
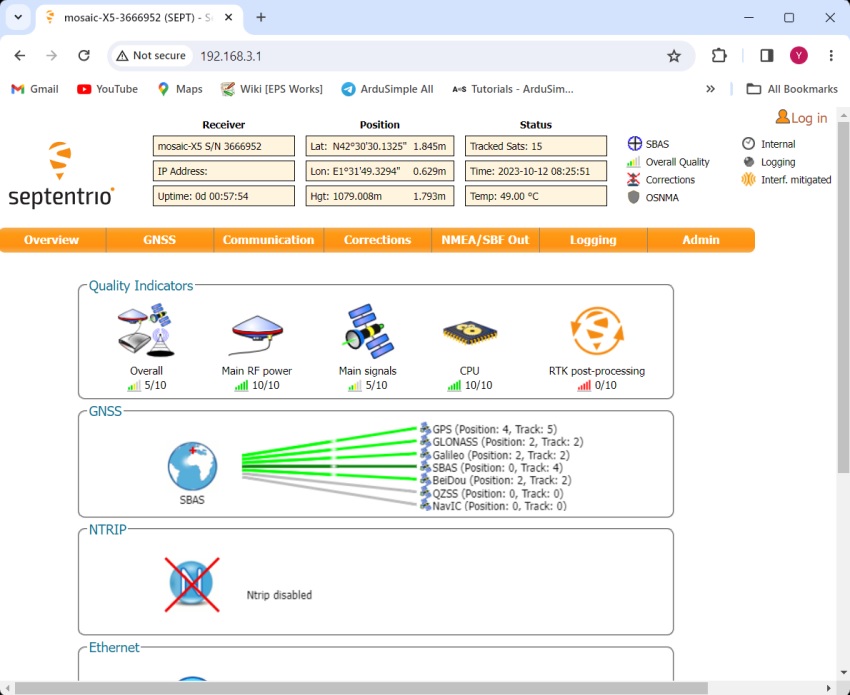
- In the upper-right corner, you should observe RTK Float or Fix with input corrections.
Record the fixed data as the location of your base station, which will be utilized in step 13. - For enhanced precision, consider logging data for a few hours. Perform post-processing using your preferred programming language, such as MATLAB or Python, to extract the coordinates of RTK fixed points from the log file and compute the mean value as your reference postion.
Using an online PPP post-processing service
- Log data from your receiver.
Use Septentrio RxTools to transform your SBF (Septentrio Binary Format) log file into RINEX. We will use the RINEX Observation file (.??O) in step 8.
If you don’t know how to do it, refer on tutorial How to generate RINEX files with simpleRTK3B.
If you have multiple files, save them in a single .zip or .tar archive. - CSRS-PPP has no requirement for the length of log data, but a more extended observation period enhances the accuracy of your base station’s location.
Note that in static mode, processing data at rates higher than 30 seconds does not improve the accuracy of the solution.
This is because CSRS-PPP uses precise GNSS clock products at a 30-second rate.
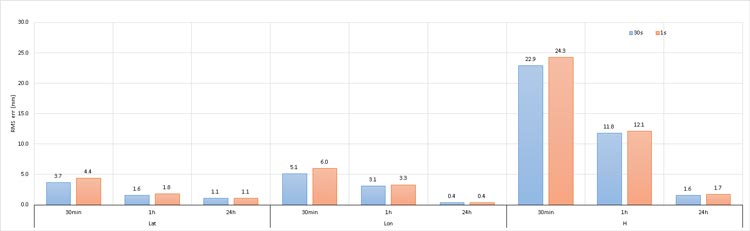
It is recommended to record a minimum of 1 hour, preferably 24 hours, of data with a 30-second interval .
The image below illustrates the Root Mean Square (RMS) values of variances among various observation session durations (30 minutes, 1 hour, and 24 hours), processed in static mode at 30-second and 1-second observation intervals. - CSRS-PPP service is free but requires registration. You can easily register on their website by providing your email and some basic information.
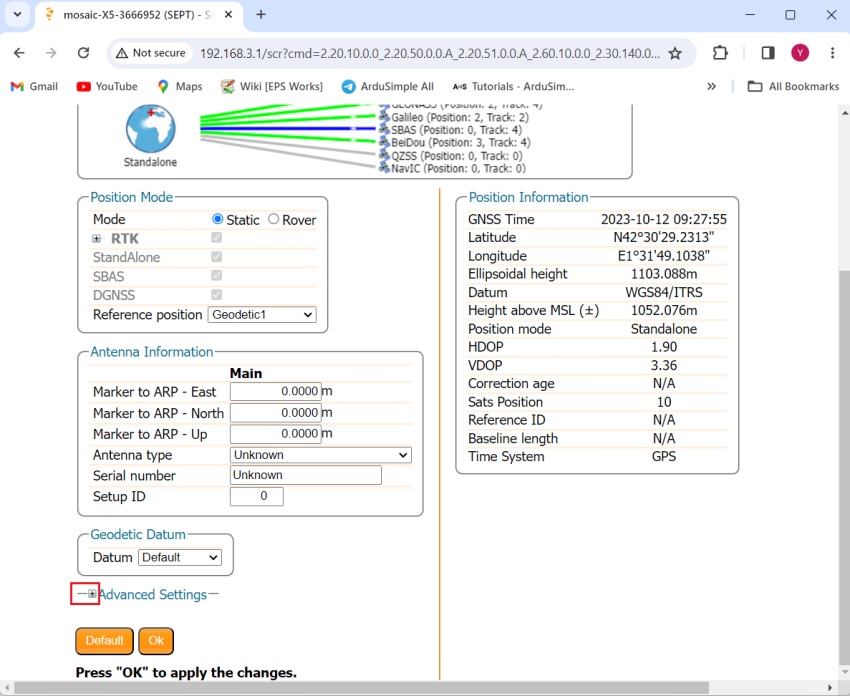
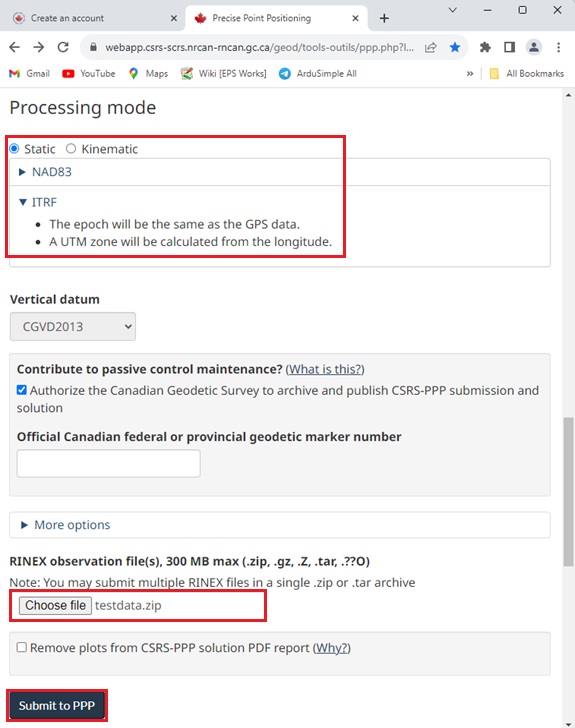
- After logging into your account, you can access the Processing mode.
Check Static.
If you are in North America, select NAD83 and choose the Epoch according to your location. Otherwise choose ITRF.
Click Choose file to upload your RINEX file.
Finally click Submit to PPP.
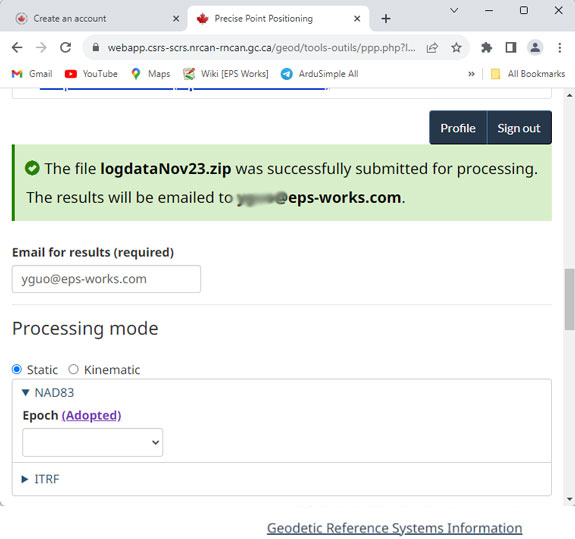
- After successfully submitting the data, you will see a note on the screen.

- You will receive an ultral-rapid result after about 1 hour. Rapid result will be available about 12 hours after the end of each day. The more accurate final result will take about 12-18 days, including GPS satellite orbits from the IGS, NRCan final GLONASS orbits, and an NRCan final clock combination. In the image below you can see the comparison of RMS errors between the CSRS-PPP ultra-rapid (DCU), rapid (DCR), and final (DCF) product lines
, rapid (DCR), and final (DCF) product lines")
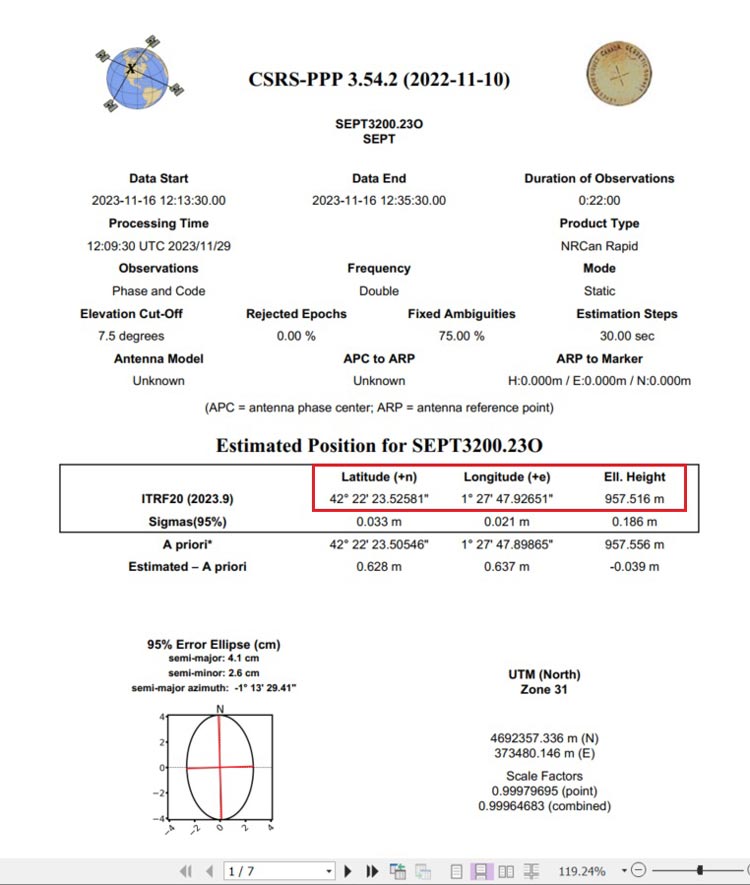
- In the PDF file of your result, you can find the estimated position for your base station.

, rapid (DCR), and final (DCF) product lines")