 and
and 

As a result, the data received on the server is displayed:
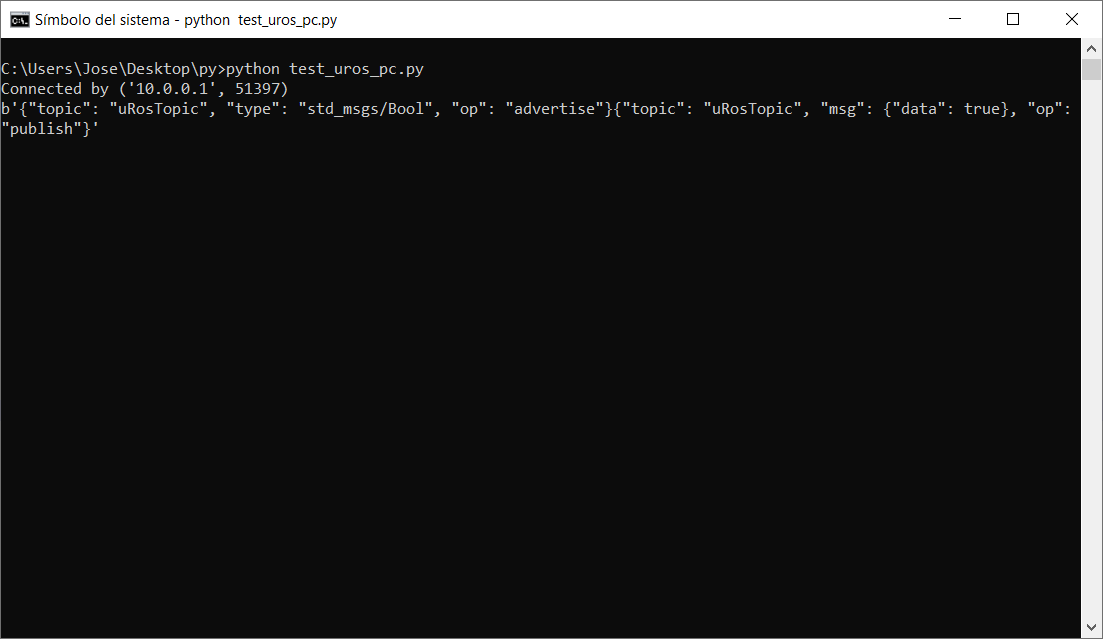
If we examine the data we see two parts:
1. The definition of our uRosTopic message. This is only sent once for each new type of message.

2. And the published data. This is sent every time we publish a new value.

Now you are ready to connect your SBC to any ROS device via ethernet, define a custom message and send it with only few lines of python code.
