 and
and 

Hardware overview:
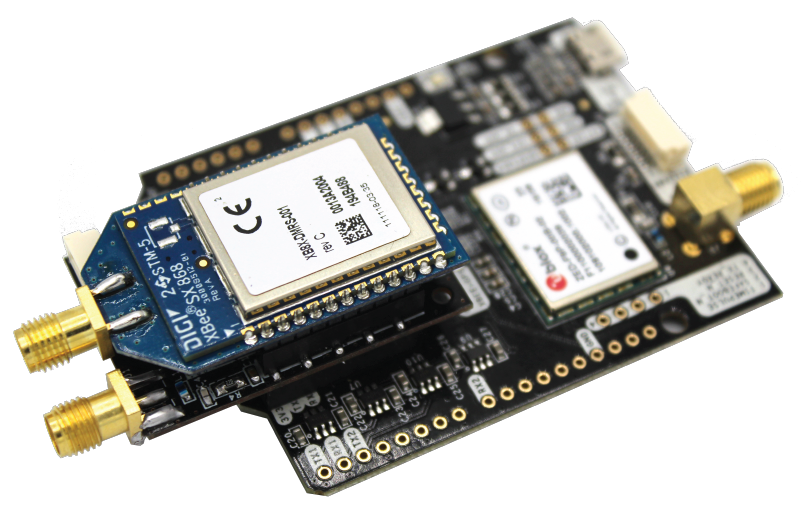
You can use simpleRTK2B+heading as a standalone board or as an arduino / Raspberry Pi shield.
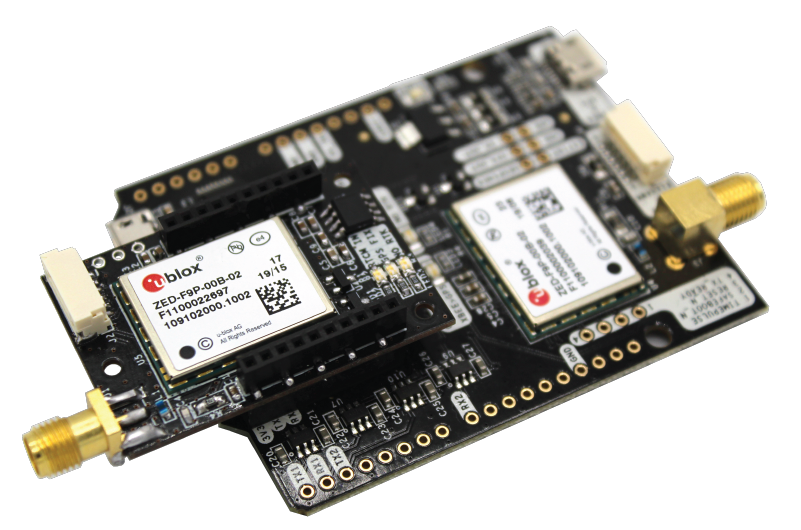
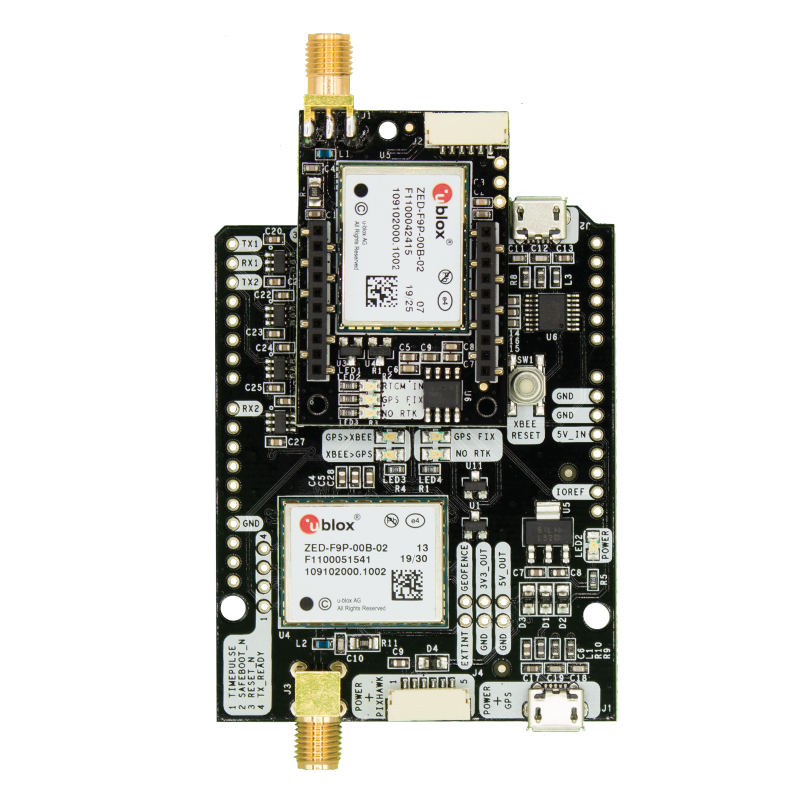
The main components of simpleRTK2B+heading are:
- simpleRTK2B (using ZED-F9P, used as “heading” board)
- simpleRTK2Blite (using ZED-F9P, used as moving base and optionally rover from a fixed base station at the same time)
If you are an advanced u-blox GPS user, you might want to have a look at the very extensive u-blox documentation.
Used standalone, simpleRTK2B+heading will provide you with very accurate RTK heading (0.4deg @ 50% with 1 meter distance between antennas), and standard dual band position accuracy (1.5m CEP)
You can upgrade your simpleRTK2B+heading board to also provide you with RTK position accuracy, by connecting it to an NTRIP server or adding one of our base station options:
Communication ports:
simpleRTK2B+heading has a few interfaces that we will now explain in detail
- Sale!
 Made in EuropeRTK starter kits
Made in EuropeRTK starter kitssimpleRTK2B Heading – Basic Starter Kit
From 414,00€ Select options This product has multiple variants. The options may be chosen on the product page

