Global Navigation Systems (GNSS) for civil use, like GPS, GLONASS, Galileo or BeiDou, can reach under excellent conditions an absolute accuracy of around 1-3 meters, in a few seconds.
This accuracy can be reduced to a few decimeters, only under static conditions and after a long survey time (24 hours).
But of course, we want to have good accuracy on moving applications 🙂
Real-Time Kinematic (RTK) positioning, is a technique used to solve this limitation.
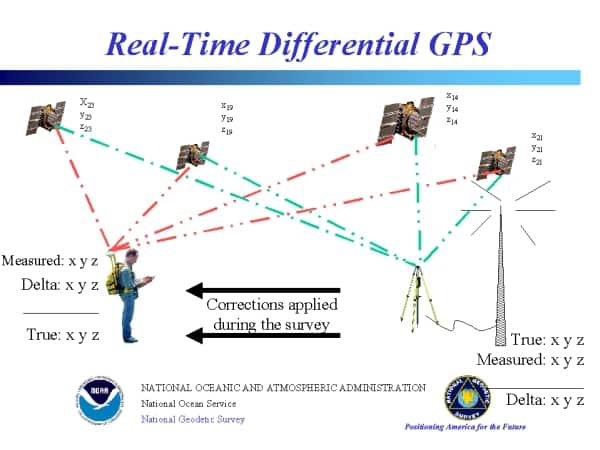
By performing measurements of the same satellites signal, from 2 nearby units, we can extract the common errors, and achieve a very high relative accuracy, that can reach 5 centimeters.
If in addition, we know the absolute position of one unit (also called “Base”), we will also have the position of the “Rover” with high absolute accuracy.
u-blox made an excellent 2-min video that explains it in a more visual way:
 and
and  How to get a quotation
How to get a quotation